
背景
精确的土地覆盖分类与制图对于土地资源规划与管理、环境保护、自然灾害防治等具有重要意义。然而,现有无人机载HSI数据集的场景覆盖范围相对简单,这在一定程度上限制了分类方法的泛化能力评估。在同一传感器下构建包含复杂且具有挑战性的场景的无人机载 HSI 数据集是值得的。
最近,奇异谱分析(SSA)由于其对全局的局部建模而在HSI特征提取和分类中受到了相当大的关注。由于HSI的三维立方结构,基于SSA的方法在内在特征表示方面仍然一些缺陷。其次,目前还没有用于HSI联合光谱空间特征提取的SSA的3D版本,这有望缓解无人机载HSI的光谱变异性和空间异质性。因此,探索新的3D SSA值得研究。此外,如何将高分辨率HSI的优势与基于SSA的方法结合起来,在精确的土地覆盖分类中具有挑战性。
本文基于构建的无人机载HSI数据集,提出了一种新颖的3DSSA方法来缓解严重的光谱变异性和空间异质性问题。在3DSSA中,我们定义了一个新的3D嵌入窗口来构造与整个HSI相对应的低秩轨迹张量,并引入t-SVD进行特征提取和重建。此外,为了减轻尺度多样性并提高分类精度,提出了扩展区域聚类(RC)3DSSA(RC-3DSSA)框架用于精确的土地覆盖分类。在RC-3DSSA中,首先针对异构区域分割执行基于光谱和空间测量的RC。然后,每个不规则异质区域填充平均像素或原始像素,并使用快速 3DSSA 版本实现进一步高效的对象级处理,以获得RC-3DSSA的两个变体(即RC-3DSSA-m和RC-3DSSA-n)。提取的光谱空间特征最终输入有效的分类器SVM以获得精确的分类结果。
试验设计
中国石油大学孙根云教授团队选取了位于中国山东省青岛市西海岸新区的三个研究区(图1)。在此研究中构建了具有高分类挑战的QUH数据集。QUH数据集包含三个子数据集,即QUH-唐岛湾、QUH-青云和QUH-平安,均由安装在无人机平台上的高光谱传感器Gaiasky mini2-VN成像光谱仪(江苏双利合谱科技有限公司)获取,规格如图2所示。三个数据集的详细飞行参数信息如表1所示。QUH-唐岛湾、QUH-青云、QUH-平安数据集详细的土地覆盖分布及相应的光谱曲线分别如图3和图4、图5和图6、图8和图9所示。然而,QUH-青云数据集的某些区域被建筑物阴影遮挡,包括树木、汽车和沥青道路等类别(图7)。
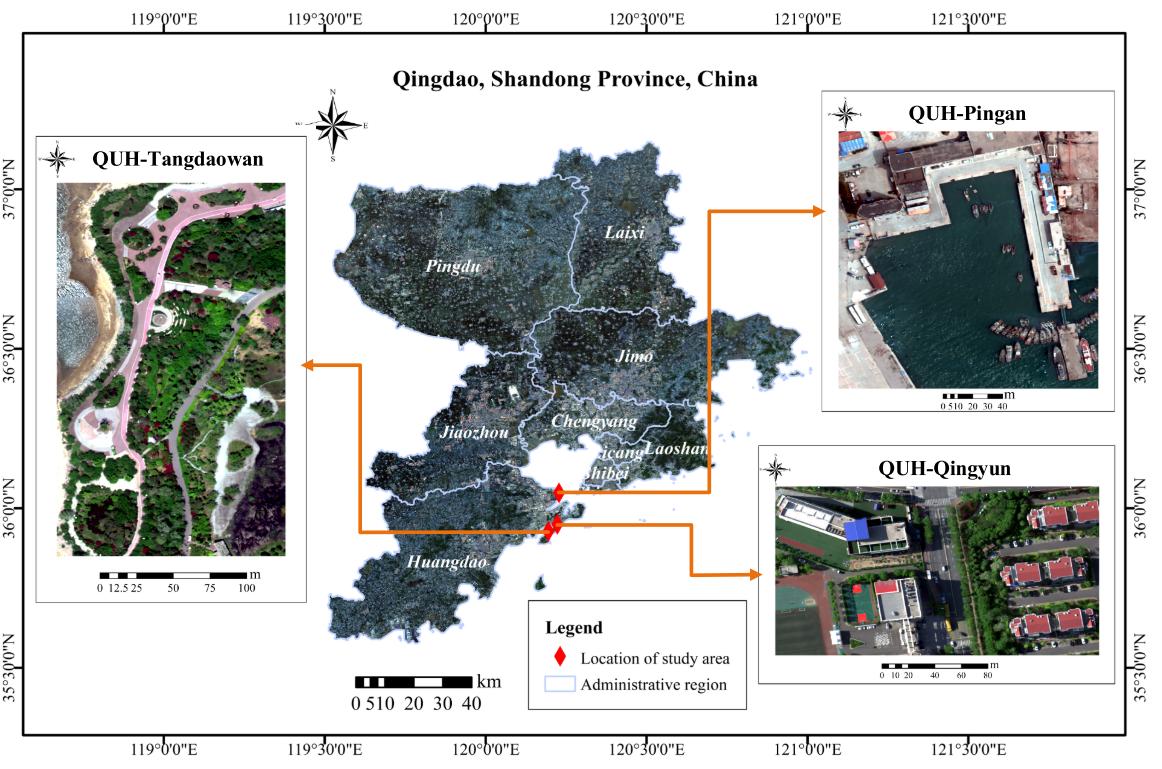
图 1:研究地点
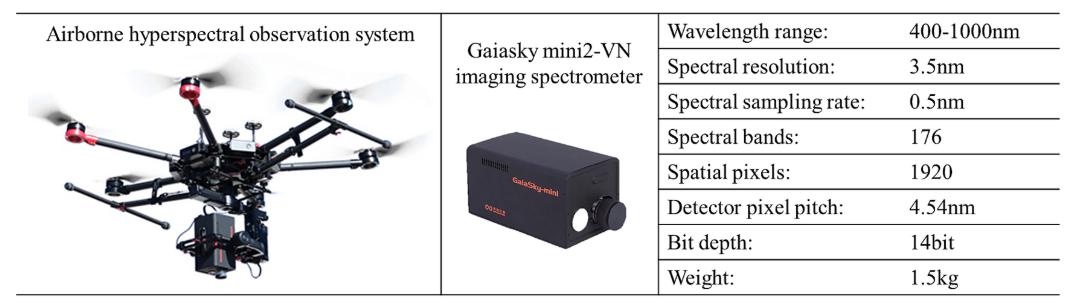
图2:无人机机载高光谱观测系统及Gaiasky mini2-VN成像光谱仪参数
表 1:三个数据集参数。

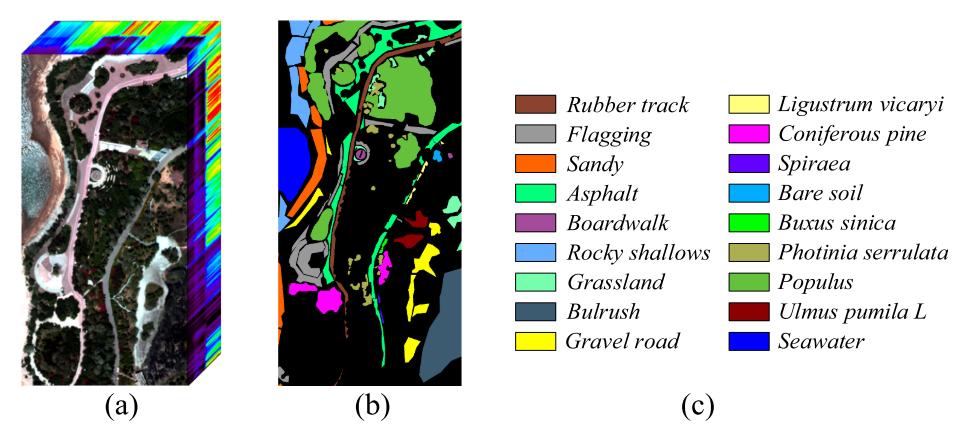
图 3.:QUH-唐岛湾数据集。(a) 图像立方体,(b) 地面实况图像,(c) 土地覆盖类别
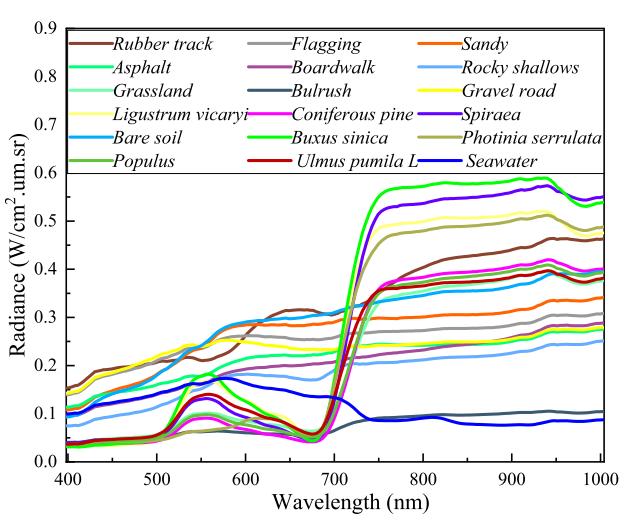
图 4.:18 个土地覆盖类别的平均光谱曲线。
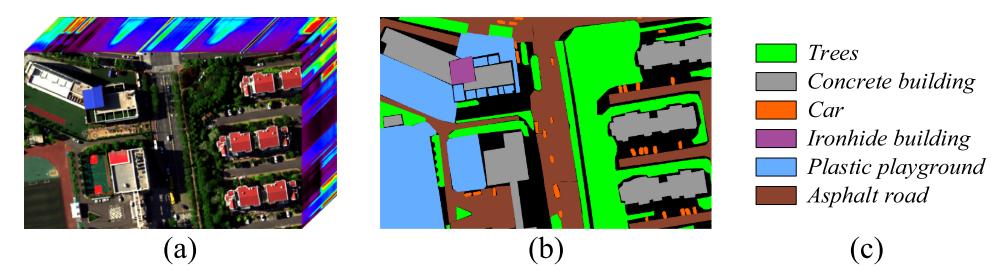
图 5:QUH-青云数据集。(a) 图像立方体,(b) 地面实况图像,(c) 土地覆盖类别
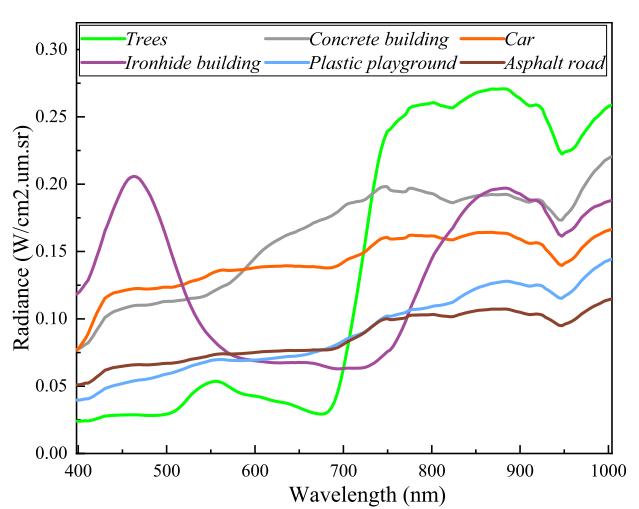
图 6:6 个土地覆盖类别的平均光谱曲线
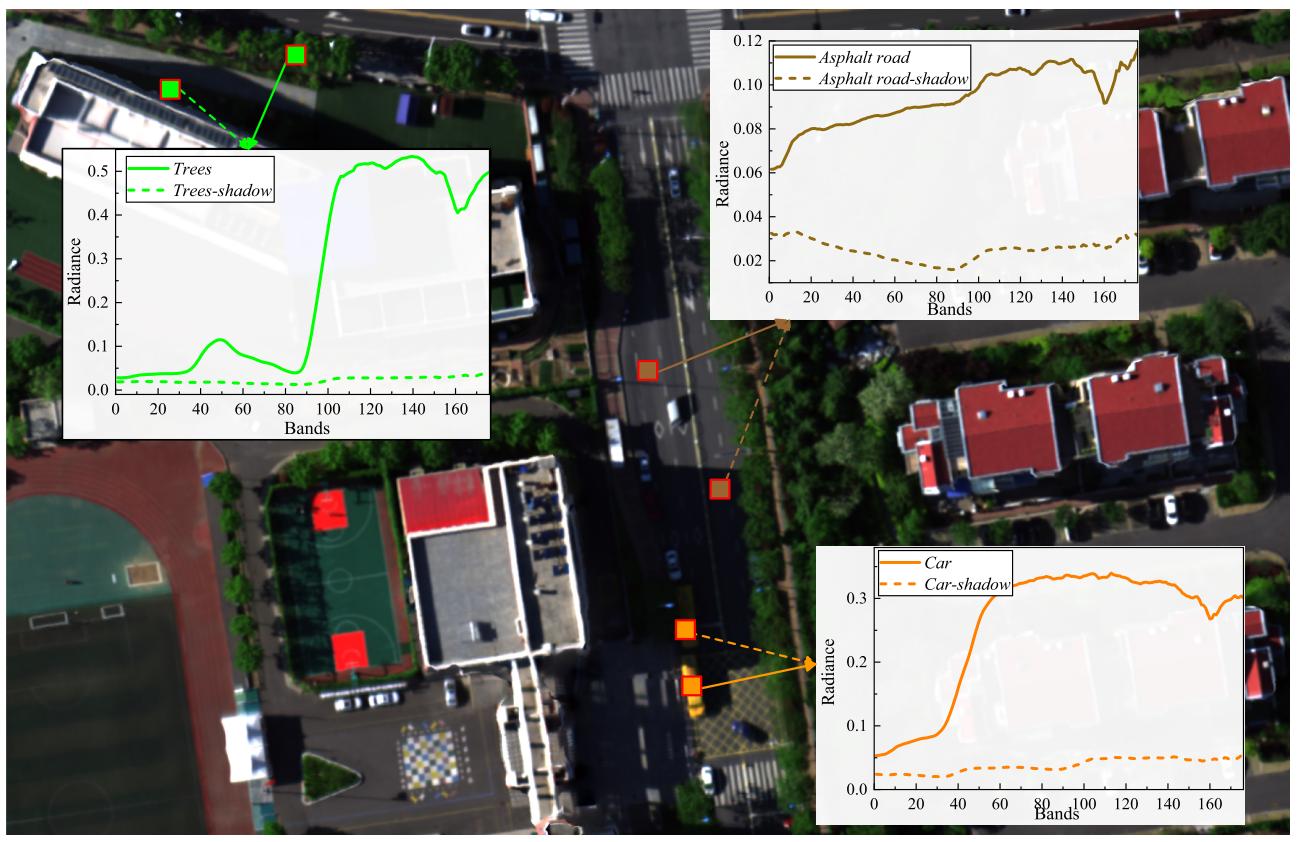
图7:土地覆盖和影子土地覆盖的光谱曲线。
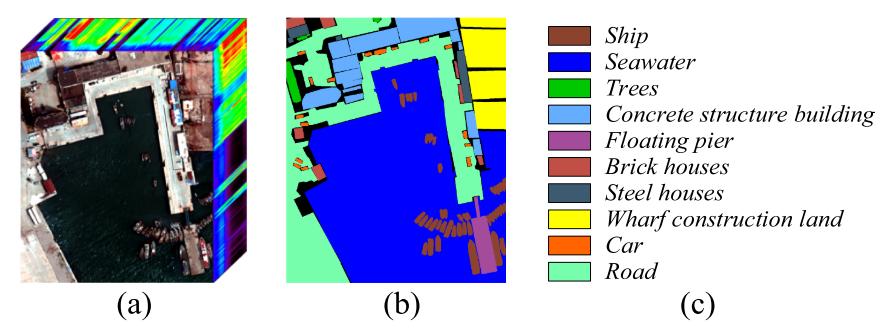
图 8:QUH-平安数据集。(a) 图像立方体,(b) 地面实况图像,(c) 土地覆盖类别
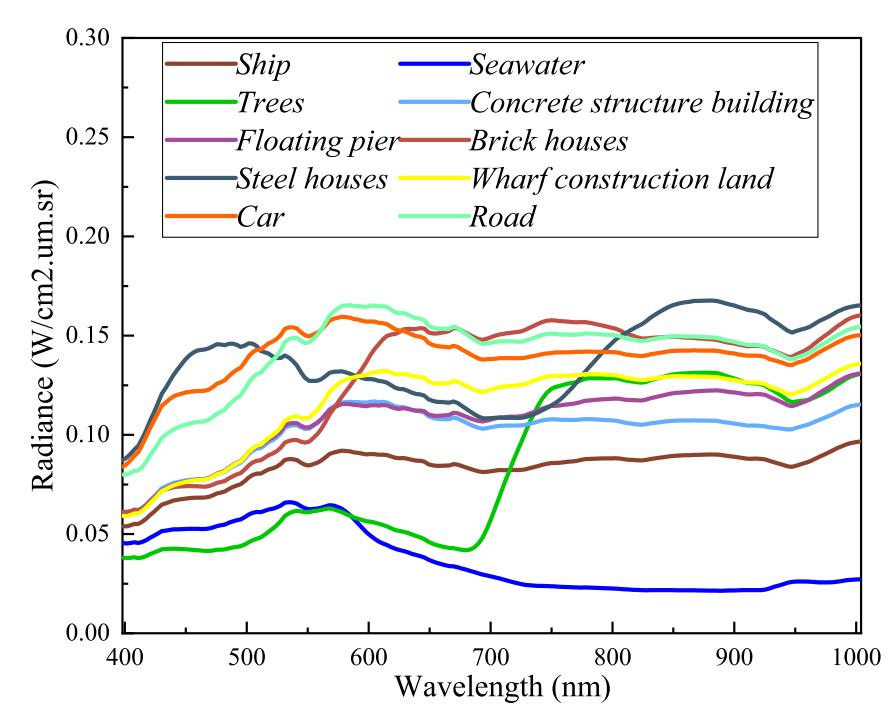
图 9:10 个土地覆盖类别的平均光谱曲线
所提出的3DSSA方法用于提取HSI中的3D光谱空间特征,并进一步设计了基于区域聚类的改进RC-3DSSA框架,用于大规模HSI的精确土地覆盖分类。 3DSSA和RC-3DSSA的流程图分别如图10和图11所示。
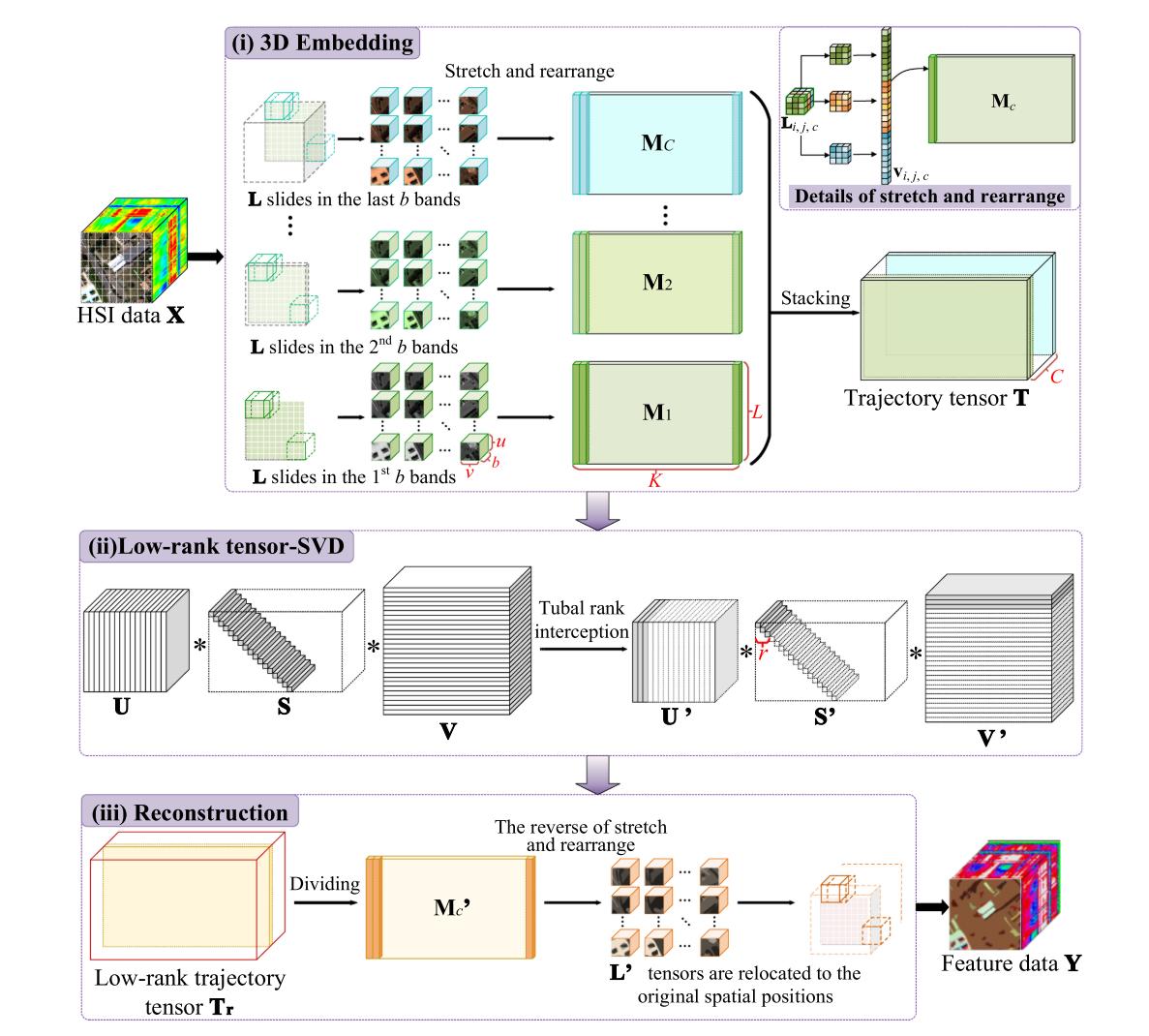
图 10:用于 3D 特征提取的 3DSSA 流程图

图 11:用于 HSI 分类的 RC-3DSSA 流程图,包括三个步骤:(a) 基于 RC 的 HSI 分割,(b) 每个区域的 3DSSA,以及 (c) 基于 SVM 的分类
所提出的 3DSSA 使用局部 3D 窗口对整个 HSI 的全局低秩张量进行建模,探索光谱和空间依赖性并提取 3D 上下文特征。它由三个主要步骤组成:(1)3D 嵌入,(2)低秩张量 SVD,(3)重建。
尽管3DSSA可以有效地提取HSI的内在空间光谱特征,但由于轨迹张量的构造,对于较大的HSI数据存在内存不足的风险。为了解决这个问题,RC3DSSA被提出用于大规模HSI特征提取和分类,它具有三个主要步骤,如图11所示。首先,对原始HSI应用RC预处理以实现同质区域的分割。然后,将3DSSA应用于每个聚类区域进行特征提取,产生光谱空间联合特征。最后利用经典的SVM分类器实现土地覆盖的精确区分。
结论
不同方法在QUH-唐岛湾数据集上的定量分类结果如表4所示。具体而言,所提出的RC-3DSSA-n在更多类别上取得了出色的准确性,RC-3DSSA-m在OA、AA和kappa方面获得了最高值。深度学习方法通常比机器学习方法取得了更高的分类精度,并且在某些类别上取得了最高的分类精度(例如C1-Rubber track和C14-Buxus sinica的MorphCNN,C2-Flagging和C17-Ulmus pumila L的SSTN) 。而机器学习方法,尤其是 SuperPCA,效率更高。提出的 RC-3DSSA 以比深度学习更低的运行成本实现了卓越的分类性能。
图16显示了所有方法的分类图,并标记了三个典型区域以进行比较。对于区域 I(黑盒),所提出的方法能够有效地区分海水、沙地和岩石浅滩并保留其形态,而 3DGW、3DWT、SuperPCA、SpaSSA 和 HybridSN 等方法的错误分类较大。对于区域 II(红框),所提出的方法准确识别了两种相似的植被,针叶松和榆树,但深度学习方法识别不足((i)-(l)),而深度学习方法识别过度SpaSSA 方法。大多数机器学习方法((c)-(g))由于分类性能较差而遭受更多的识别错误。对于区域III(白盒),RC-3DSSA有效地保留了以碎石路和橡胶跑道为主的不规则形状和道路连续性,而SVM、2DSSA、3DGW、3DWT、SuperPCA、HybridSN和SpectralFormer的结果并不令人满意。总的来说,RC-3DSSA方法在复杂特征分布和相似目标混淆的情况下提供了优异的分类性能。
QUH-Qingyun数据集面临阴影遮挡和小目标识别的挑战,表5列出了所有方法的定量分类结果。特别是,RC-3DSSA-n 在 C3-Car 小目标类别上实现了最高的准确率和 AA (76.23%),而 RC-3DSSA-m 在所有其余类别上实现了超过 85% 的准确率,并且具有最高的 OA 和卡帕。 SpaSSA、HybridSN、MorphCNN 和 SSTN 分别在 C2-混凝土建筑、C1-树木、C4-铁皮建筑和 C5-塑料游乐场类别上具有最高的准确率。所提出的 RC-3DSSA 的运行时间比大多数深度学习方法更快,但比机器学习方法慢,其中 SuperPCA 运行速度最快。
所有方法的分类图和三个标记的典型区域如图17所示。区域I和II分别是阴影遮挡下的植被和道路,区域III是小目标(汽车)的区域。对于区域I(黑盒),RC-3DSSA-n和RC-3DSSA-m均准确提取了阴影下的植被区域,2DSSA、SpaSSA、SpectralFormer和SSTN仅提取了部分植被,而其余方法未能识别。对于区域 II(红框),RC-3DSSA-n 准确地识别并保留了沥青路的主要形状,而 SSTN 和 SpaSSA 存在一些识别错误。然而,SSTN 和 SpaSSA 有大片区域的沥青路被错误分类为汽车。对于区域 III(白盒),RC-3DSSA-m 提取汽车小目标的精度最高,RC-3DSSA-n 和 SSTN 次之。其余方法在小目标的识别和提取方面表现不佳。此外,所提出的RC-3DSSA-n和RC-3DSSA-m对于不同场景(阴影干扰或小目标)的性能有所不同,实际中可以根据场景特征选择两种方法中更合适的方法应用程序。
QUH-Pingan数据集在小、中、大尺度上都具有挑战性的场景,不同方法的分类精度总结在表6中。具体来说,所提出的RC3DSSA-n在小尺度和大尺度场景分类方面具有优势。中规模(例如C1-船舶、C3-树木和C4-混凝土结构建筑),而RC-3DSSA-m更适合大规模场景(例如C2-海水和C5-浮动码头)。同样,RC-3DSSA-m和RC-3DSSA-m分别获得了最高和第二高的OA、AA和kappa,计算效率比深度学习方法更快。请注意,SuperPCA 在五个类别上以*高效的方式实现了最高的分类精度,但由于 C2-海水和 C10-Road 上的精度较低,OA 和 kappa 较差。
图 18 显示了所有方法和三个典型区域的分类图。从图 18 可以看出,本文提出的方法对于大规模场景(主要是海水和道路)的分类结果平滑度高且无噪声,三种深度学习方法 MorphCNN、SpectralFormer 和 SSTN 也有不错的效果,而其余的方法存在不同程度的分类错误。从区域I和区域II,拟议的RC-3DSSA可以识别和提取完整的小规模目标——汽车和船舶;从区域III来看,RC-3DSSA 可以准确地区分出中等规模的复杂小型建筑。总体而言,所提出的方法对于多尺度场景分类更适用且更准确,并且这种优势将在 5.5 节中在不同数据集上进一步得到证明。
 地址:无锡市梁溪区南湖大道飞宏路58-1-108
地址:无锡市梁溪区南湖大道飞宏路58-1-108
.png) 电话:13810664973
电话:13810664973
.png) 邮箱:info@dualix.com.cn
邮箱:info@dualix.com.cn
地址:北京市海淀区中关村大街19号
电话:13810664973
邮箱:info@dualix.com.cn
地址:陕西省西安市高新区科技一路40号盛方科技园B座三层东区
电话:13810664973
邮箱:info@dualix.com.cn
地址:成都市青羊区顺城大街206号四川国际大厦七楼G座
电话:13810664973
邮箱:info@dualix.com.cn
地址:深圳市龙华区民治梅龙路电话:13810664973邮箱:info@dualix.com.cn
 在线咨询
在线咨询