
基于无人机高光谱不同高度的地物快速识别研究
摘要:无人机遥感以其操作简便、高时效、高分辨率、低成本、低风险、低损耗等传统
遥感无法比拟的优势,给高空目标识别、地物分类等研究提供了新的平台。为了研究不同高度下地物的光谱特征变化以及不同时期、不同高度下地物的有效快速识别方法,本研究以2015年8月7日200 m高空高光谱影像和2015年9月25日100 m、200 m、300 m高空高光谱影像共4景影像为研究对象,研究不同高度下,地物的高光谱特征变化以及不同时期、不同高度下地物的分类精度。结果表明不同高度下,植被的光谱反射率差异显著,随着高度的升高,植被特有的特征如“绿峰”降低、“红谷”升高、“红边位置”出现“红移”,在近红外范围内,光谱反射率降低;在综合考虑人工参与程度、处理时间和分类精度等方面进行比较可知,基于ISODATA法可实现不同时期、不同高度下地物的快速识别研究。研究结果为利用无人机高光谱遥感在其他领域的应用奠定了基础。
关键词:无人机遥感;高光谱;不同高度;地物识别;ISODATA
无人机(unmanned aerial vehicle,UAV),是一种通过无线遥控或规划航线飞行的无人驾驶飞机,它一般有动力系统、飞控系统、无线通讯遥控系统、有效载荷(武器、侦查设备)等部分组成[1]。无人机与遥感技术的结合,即无人机遥感,克服了近地面小范围的作物遥感监测的极限,同时也克服了卫星影像受时间分辨率、空间分辨率的影响。无人机遥感以其全天时、实时化、高分辨率、灵活机动、高性价比等优势,在农业、生态环境、新农村建设规划、自然灾害监测、公共安全、水利、矿产资源勘探、测绘等国民经济及社会发展各个领域发挥着越来越重要的作用,成为继卫星遥感和有人通用航空遥感技术之后的新兴发展方向[2]。
目前,国内外学者通过无人机遥感平台搭载各种传感器获取地面图像光谱信息,取得了较大的研究进展。如Sugiura 等[3]将成像传感器搭载在无人机上,获取小面积农田信息,划分出研究区域内的作物叶面积指数分布情况。李冰等[4] 利用低空无人机遥感监测冬小麦不同生长时期覆盖度的变化。Mitch Bryson 等[5]使用可见光低空拍摄无人机影像基于植被颜色及纹理对不同植被类型进行分类。Francisco 等[6]使用无人机影像对植被黄龙病进行监测。Córcoles 等[7]利用旋翼无人机实现了洋葱郁闭度的无损测量,并建模分析了郁闭度与叶面积指数之间的关系。刘峰等[8]设计构建基于无人直升机平台的低空遥感系统,对板栗生育期内植被覆盖度变化情况实施了监测。高林等[9] 以多旋翼无人机为平台同步搭载高清数码相机和多光谱传感器组成的无人机农情监测系统对研究大豆叶面积指数反演,取得了较高的精度。
然而,国内外大部分学者利用无人机遥感平台运用于作物的农情监测、矿产资源探测等领域较多[10-12],然而很少有人利用无人机平台搭载成像高光谱传感器研究不同高度下同一地物光谱反射率的变化以及不同高度下不同时期地物的快速识别研究。因此本研究利用无人机搭载成像高光谱仪,以期分析不同高度下地物的光谱反射率差异和不同高度不同时期地物的快速精准识别,为利用无人机高光谱遥感在其他领域的应用奠定基础。
2.1 研究区域
野外实验分别于2015年8月7日和9月25日在北京市通州区马驹桥镇某农田开展。
2.2 数据采集设备
本次试验采用大疆八旋翼无人机S1000 (无人机净重约4 kg,最大载重约 6 kg),在无人机遥感平台上搭载四川双利合谱科技有限公司自主研发的成像光谱仪GaiaSky-mini,该无人机遥感平台采用的是无人机悬置空中,成像光谱仪内置推扫获取地面图像(其主要参数见表1)。8月7日仅飞行了200 m高度,地面范围约80 m×80 m;9月25日飞行了100 m、200 m、300 m三个不同高度,地面范围分别约为40 m×40 m、80 m×80 m、120 m×120 m,无人机遥感平台的实景图,如图1。
表1 GaiaSky-mini 机载成像高光谱仪系统参数
Table 1 GaiaSky-mini high airborne imaging spectrometer system parameters
|
序号 |
项目 |
参数 |
|
1 |
光谱扫描范围/nm |
400~1000 |
|
2 |
光谱分辨率/nm |
4±0.5 |
|
3 |
成像镜头/mm |
23 |
|
4 |
光谱通道数 |
520 |
|
5 |
全幅像素 |
1392×1040 |
|
6 |
传感器 |
CCD Sony ICX285 |
|
7 |
重量 |
约1.0kg |

图1 无人机遥感平台实景图
Fig. 1 UAV remote sensing platform picture
2.3 数据的预处理与分析
无人机高光谱图像的预处理在四川双利合谱科技有限公司自主研发的SpecView软件中进行,包括镜像变换[13]、黑白帧校准[14-15](如公式1所示)。高光谱图像噪声去除采用最小噪声分离变换(Minimum Noise Fraction Rotation,MNF Rotation)[16-18],图像的感兴趣区域提取、图像分类方法均在ENVI/IDL 5.3上完成。
 (1)
(1)
式中,Rref 是校正过的图像,DNraw 是原始图像,DNwhite为白板校正图像,DNdark 是黑板校正图像。
高光谱遥感图像分类是高光谱遥感图像分析和应用的重要内容,根据是否使用类别的先验知识,可分为监督分类和非监督分类,常用的监督分类方法有最小距离分类法、马氏距离分类法、最大似然分类法、光谱匹配法和神经网络法等,非监督分类常用的方法有K-Means和ISODATA法[19]。本研究运用监督分类方法中的马氏距离分类法、最大似然分类法、神经网络法以及非监督分类的ISODATA法,比较这四种分类方法在不同高度下不同时期的无人机高光谱影像中地物的分类识别精度,本研究利用总体分类精度和Kappa系数对分类精度进行评价[20]。
3.1 同一研究区域不同高度下光谱曲线的差异分析
图2为9月25日,天气为晴,基于无人机获取的三个不同高度的高光谱图像的(RGB真彩色合成图),光谱曲线分别为同一研究区域,100 m、200 m、300 m三个高度的光谱曲线差异。以植被为研究对象,分析同一研究区域不同高度下光谱曲线的差异。以一个具体的植被象元为例,从图2中可知,不同高度下植被光谱反射率差异显著,随着高度的升高,植被特有的特征“绿峰”降低、“红谷”升高、“红边位置”出现“红移”。且在400-510 nm范围内光谱反射率随无人机飞行高度的升高而升高;在近红外范围内,光谱反射率随无人机飞行高度的升高而降低,该这是因为随着高度升高,空间分辨率降低,图像中一个像元代表地面的范围加大,出现混合像元的概率增加。从图2中可知,随着无人机高度的升高,混合像元中土壤所占比例增加,从而造成“绿峰”降低、“红谷”升高,红边位置发生了“红移”等现象。
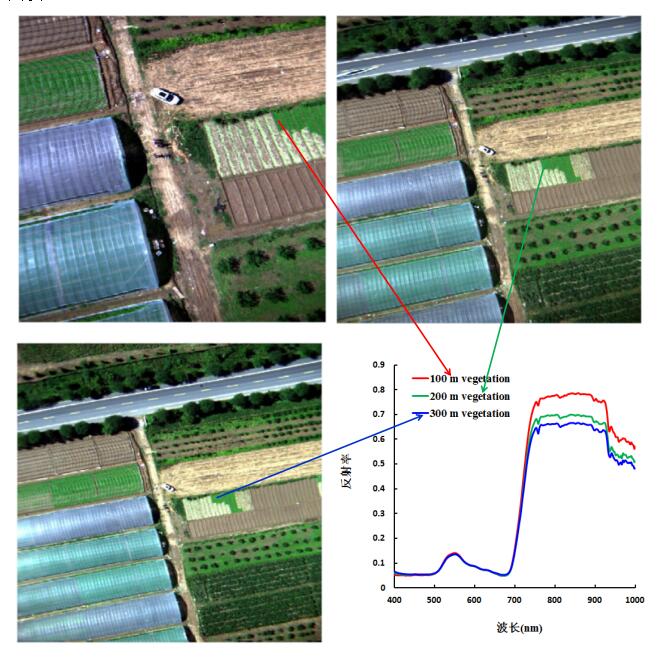
图2 同一研究区域不同高度下光谱曲线
Fig. 2 The spectral curve at different heights in the same study area
3.2 机载影像中不同地物的光谱曲线差异分析
图3为8月7日天气为晴,利用无人机获取的近地面200 m高度的高光谱图像及不同作物与土壤的光谱反射率曲线。从图中可知,土壤的光谱曲线与三种作物的光谱曲线差异显著,在400-515 nm和580 - 690 nm范围内,土壤的光谱反射率高于三种作物的光谱反射率。在可见光区域,茄子苗、西瓜苗、葡萄树三种作物的光谱反射率差异也较为显著,其中西瓜苗的光谱反射率最高,其次是茄子苗,最后是葡萄树;在近红外区域,西瓜苗和茄子苗的光谱反射率十分相近,总体而言,茄子苗的光谱反射率最高,其次是西瓜苗,最后是葡萄树。
.jpg)
图3 8月7日不同作物与土壤的光谱反射率曲线
Fig. 3 The spectral reflectance curves of different crops and soil on August 7
图4为9月25日天气为晴,利用无人机获取的近地面300 m高度的高光谱图像及不同地物的光谱反射率曲线。从中可知,植物、土壤、公路、大棚植物等地物光谱曲线差异显著。在400-920 nm范围内公路的光谱反射率曲线保持较平稳的趋势,土壤的光谱反射率在此范围内呈上升趋势;400-700 nm范围内,大棚植物的光谱反射率高于裸露植物,而在700-100 nm范围内,则是裸露植物的光谱反射率高于大棚植物。
.jpg)
图4 9月25日不同地物的光谱反射率曲线
Fig. 4 The spectral reflectance curves of different ground objects on September 25
3.3 不同地物的快速识别分类研究
分别运用马氏距离法、最大似然法、神经网络、ISODATA(K-Means分类效果不佳,在此不列举)四种分类方法对8月7日的200 m高光谱图像和9月25日的300 m高光谱图像进行分类研究。完成分类之后,使用目视判读的方法从图像上选取不同地物各1000像元计算混淆矩阵进行验证。结合验证数据,采用混淆矩阵的方法对 4 类方法进行精度评价,结果如表 2和表3 所示。从表2和表3可知,神经网络法的分类精度最高,其次是马氏距离分类法,再次是ISODATA法,最低的最大似然分类法。但从处理时间来看,神经网络的处理时间较长,分别为35.14 min和38.26 min,其次是最大似然分类法,分别为15.61 min和16.75min,再次是马氏距离法,分别是12.54 min和14.55 min,处理时间最短的是ISODATA法,处理时间分别为3.64 min和3.97 min。
表2 8月7日的200 m高光谱图像分类精度评价
Table 2 200 m hyperspectral image classification accuracy evaluation on August 7
|
分类方法 |
总体分类精度 |
Kappa系数 |
处理时间/min |
|
马氏距离 |
92.67% |
0.915 |
12.54 |
|
最大似然法 |
86.65% |
0.844 |
15.61 |
|
神经网络法 |
98.56% |
0.982 |
35.14 |
|
ISODAIA |
89.41% |
0.887 |
3.64 |
表3 9月25日的300 m高光谱图像分类精度评价
Table 3 300 m hyperspectral image classification accuracy evaluation on September 25
|
分类方法 |
总体分类精度 |
Kappa系数 |
处理时间/min |
|
马氏距离 |
94.07% |
0.922 |
14.55 |
|
最大似然法 |
89.45% |
0.863 |
16.75 |
|
神经网络法 |
98.76% |
0.984 |
38.26 |
|
ISODAIA |
90.53% |
0.891 |
3.97 |
4种分类方法的原理各不同,从人工参与程度、处理效率和分类精度等方面进行比较分析可知,ISODATA法的分类精度虽然低于神经网络和马氏距离法,但是不需要太多的人工参与,处理却大大提高,且分类精度高于最大似然分类法。因此,它同时具备了监督分类的高精度和非监督分类的低时间的特点,在无人机低空遥感研究中,能够以较低的工作成本快速获取高精度的地物识别。图5和图6分别为8月7日200 m和9月25日300 m高光谱图像基于ISODATA法的分类效果图。从图5可知,少量的杂草被错分为葡萄树、西瓜苗、茄子苗,但是从大的区域来看,原味葡萄树、西瓜苗、茄子苗的像素并未存在错分和漏分现象。在图6中,少量的土壤,可能是沙土,被错分为大棚或公路斑马线,其他地物不存在错分和漏分现象。总体而言,ISODATA法可实现无人机高光谱遥感对地面地物的快速有效的识别。
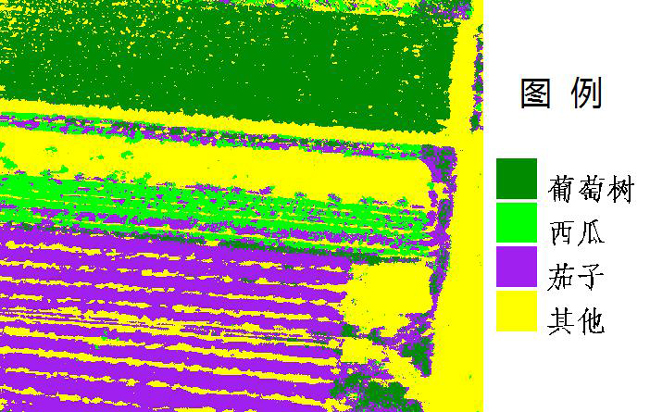
图5 8月7日200 m高光谱图像基于ISODATA法的分类效果图
Fig. 5 The classification rendering of 200m hyperspectral image based on ISODATA method on August 7
.jpg)
图6 9月25日300 m高光谱图像基于ISODATA法的分类效果图
Fig. 6 The classification rendering of 300m hyperspectral image based on ISODATA method on September 25
4. 结论
本研究基于无人机平台搭载成像高光谱相机,分别获取了两个时间段不同高度的高光谱图像,分析了不同高度同一地物光谱曲线的差异和基于不同高度下不同分类方法的分类精度评价。研究表明随着无人机高度的升高,混合像元中土壤所占比例增加,从而造成“绿峰”降低、“红谷”升高,红边位置发生了“红移”等现象,研究结果与地面光谱仪ASD的研究结果一致[21-22]。ISODATA法的分类精度虽然不及神经网络和马氏距离分类法,但是在综合考虑人工参与程度、处理效率和分类精度时可知,ISODATA法对于快速实现地物的识别效果最佳,研究结果为利用无人机高光谱遥感进行军事伪装快速识别、海洋油污面积估测、灾害损失评估等领域具有重大意义。
参考文献
[1] 邹湘伏,何清华,贺继林. 无人机发展现状及相关技术[J]. 飞航导弹,2006(10): 9 -14.
[2] 周清波. 国内外农情遥感现状与发展趋势[J]. 中国农业资源与区划,2004,25(5): 9 -14.
[3] Sugiura R, Noguchi N, Ishii K. Remote sensing technology for vegetation monitoring using an unmanned helicopter[J]. Biosystems Engineering, 2005, 90(4): 369 -379.
[4] 李冰,刘镕源,刘素红,等. 基于低空无人机遥感的冬小麦覆盖度变化监测[J]. 农业工程学报,2012,28(13): 160-165.
[5] Bryson Mitch, Reid Alistair, Ramos Fabio, et al. Airborne vision-based mapping and classification of large farmland environments[J]. Journal of Field Robotics, 2010, 27(5): 632-655.
[6] Garcia Ruiz Francisco, Sankaran Sindhuja, Maja Joe Mari, et al. Comparison of two aerial imaging platforms for identification of Huanglongbing-infected citrus trees[J]. Computers and Electronics in Agriculture, 2013, 91: 106-115.
[7] Córcoles J I, Ortega J F, Hernández D, et al. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle[J]. Biosystems Engineering, 2013, 115(1): 31- 42.
[8] 刘峰,刘素红,向阳. 园地植被覆盖度的无人机遥感监测研究[J]. 农业机械学报,2014,45(11): 250 - 257.
[9] 高林,杨贵军,王宝山等. 基于无人机遥感影像的大豆叶面积指数反演研究[J]. 中国生态农业学报,2015,23(7): 868-876.
[10] 田振坤,傅莺莺,刘素红等. 基于无人机低空遥感的农作物快速分类方法[J]. 农业工程学报,2013,29(7): 109-116.
[11] 王利民,刘佳,杨玲波等. 基于无人机影像的农情遥感监测应用[J]. 农业工程学报,2013,29(18): 136 -145.
[12] 邴媛媛. 无人机遥感在某铁矿矿区资源监测中的应用[M]. 辽宁,辽宁工程技术大学, 2008.
[13] 赛恒吉雅. 数字图像镜像变换方法的实现[J]. 信息科技,2010,18(2):142-143.
[14] 张东彦. 基于高光谱成像技术的作物叶绿素信息诊断机理及方法研究[M]. 浙江,浙江大学,2012.
[15] Liu Jiangui, Wu Changshan, Zhang Bing, et al. Spectral reflectance retrival of image data by imaging spectrometer PHI[J]. Journal of Remote Sensing, 1999, 3(4): 290-294.
[16] Numata Izaya, Roberts Dar A, Chadwick Oliver A, et al. Evaluation of hyperspectral data for pasture estimate in the Brazilian Amazonusing field and imaging spectrometers[J]. Remote Sensing of Environment, 2008, 112:1569-1583.
[17] Petropoulos George P, Arvanitis Kostas, Sigrimis Nick. Hyperion hyperspectral imagery analysis combined with machine learning classier for land use/cover mapping[J]. Expert Systems with Applications, 2012, 39:3800-3809.
[18] Wang JianJun, Zhang Yun, Bussink Coen. Unsupervised multiple end member spectral mixture analysis based detection of opium poppy fields from an EO-1 hyperion image in Helmand, Afghanistan[J]. Science of the Total Environment, 2014, 476:1-6.
[19] 梅安新,彭望碌,秦其明,刘慧平. 遥感导论[M]. 北京,高等教育出版社,2005.
[20] 赵英时. 遥感应用分析原理与方法[M].北京,科技出版社,2003.
[21] 储旭. 不同覆盖度条件下水稻叶层氮素营养的高光谱监测研究[M],南京,南京农业大学,2013.
[22] Yao X, Ren H, Cao Z, et al. Detecting leaf nitrogen content in wheat with canopy hyperspectrum under different soil backgrounds. International Journal of Applied Earth Observation and Geoinformation, 2014, 32:114 -124.


 地址:Jingsu Dualix Spectral Imaging Technology Co., Ltd. 58-1-108, Feihong Road, Nanhu Avenue, Liangxi District, Wuxi China
地址:Jingsu Dualix Spectral Imaging Technology Co., Ltd. 58-1-108, Feihong Road, Nanhu Avenue, Liangxi District, Wuxi China.png) 电话:010-62634840
电话:010-62634840
.png) 传真:010-82618238
传真:010-82618238
.png) 邮箱:info@dualix.com.cn
邮箱:info@dualix.com.cn



